广东省工业机器人工程技术研究中心实验室建设项目介绍
公司建设有广东省级的工程研究中心:广东省工业机器人集成与应用工程技术研究中心。2016年1月成立工业机器人集成与应用工程技术校级研究所,对机器人集成与应用的相关领域内容进行研究,2017年由科研处牵头,联合校内4个工科学院,申报广东省工业机器人集成与应用工程中心,并于当年获得省科技厅批准,2018年:“广东省工业机器人集成与应用工程中心”已挂牌并正式开展研究工作。机电工程学院承担了机器人应用实验室及机器人仿真与离线编程实验室建设,并已投入研发和教学。
一、机器人应用实验室简介
机器人应用实验室有双机器人生产线实训平台,机器人柔性工作站,机器人故障诊断与维修系统,双并联联动机器人及控制系统,双臂机器人工作站,机器人打磨工作站,人机码垛、轨迹、协作等工作站,机器人装配工作站各一台套,价值200万左右。主要针对机器人工程、机械设计制造及自动化、机械电子工程、电气工程及自动化、自动化等专业本科老员工的教学,教师科研,工程技术人员培训等。
实验内容:
1、双机器人生产线应用研究与实验
2、机器人工作站系统与应用训练
3、机器人故障诊断与维修实验
4、双并联联动机器人及控制系统实验
5、智能产线科学研究和应用开发
6、人机交互及视觉系统应用研究
7、机电一体化系统集成应用研究
实验特色:
实验室建设紧密围绕服务机器人智能化、产业化的重大需求,以“工业机器人应用技术”为中心,为工业机器人系统,提供新颖方法、关键技术和创新应用研究和实验。主要开展机器人设计方法与技术、机器人认知与智能行为控制、人机交互理论与技术、机器人及机电一体化系统集成技术研究和实验。培养和汇聚一批高素质教学、科研队伍,促进学科交叉融合的学科体系。
实验设备:
序号 |
实训设备名称 |
参考型号(备注) |
参考供应商 |
数量 |
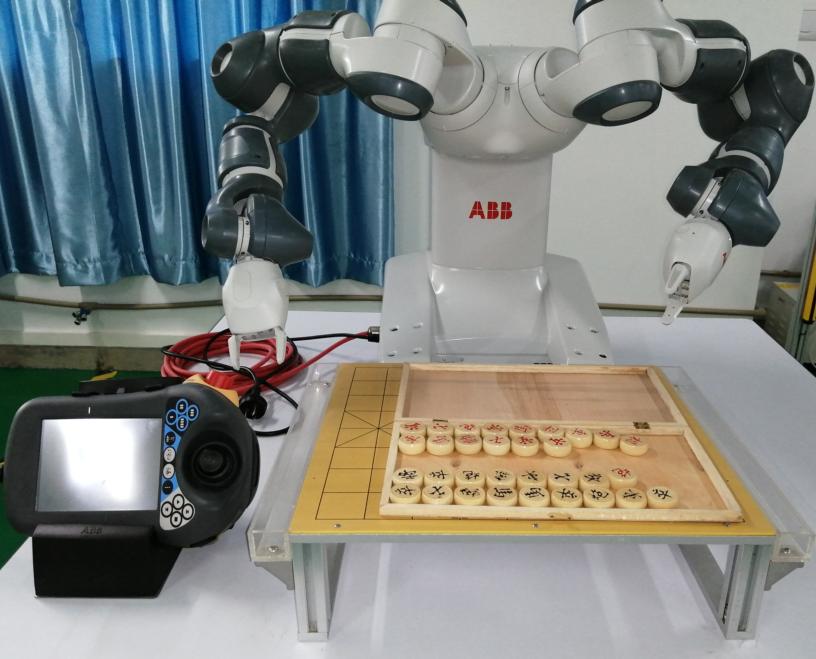
1 |
双机器人生产线实训平台 |
由一台串联SCARA机器人和一台并联DELTA机器人两种不同构型的机器人组成,象棋上料、识别、分拣和摆放。 |
博文 |
1 |
2 |
机器人柔性工作站 |
综合柔性加工系统机器人工作站,具有视觉、压力、光电等传感器,KUKA机器人 |
汇博/广数 |
1 |
3 |
机器人故障诊断与维修系统 |
GMI-GZZD-01(含一台综合柔性加工系统机器人工作站,ABB机器人,工作站电气故障检测系统) |
省机械所,ABB |
1 |
4 |
双并联联动机器人及控制系统 |
DL-DeltaRobotic /DSCR3或者DSCR5 双臂协作机器人 |
巨轮/新松机器人公司 |
1 |
5 |
双臂机器人工作站 |
定制:ABB人 |
巨轮或ABB |
1 |
6 |
机器人打磨工作站 |
定制:YASKAWA机器人 |
园大 |
1 |
7 |
人机码垛、轨迹、协作等工作站 |
定制:GSK机器人 |
园大 |
1 |
8 |
机器人装配工作站 |
定制:Kawasaki机器人 |
园大 |
1 |
二、机器人仿真与离线编程实验室简介:
机器人仿真与离线编程实验室有虚实结合机器人综合实训平台2套,机器人单体单元4台,机器人仿真与离线编程软件及电脑52套,价值40万左右。主要针对机器人工程、机械电子工程、电气工程及自动化等专业本科老员工的教学,教师科研,工程技术人员培训等,结合智能制造,依托机器人工程中心平台,开展战略性、前瞻性的先进机器人应用研究,通过多学科交叉,积极开展高水平学术交流与合作,将实验室建设成为具有一定国内影响力的机器人技术自主创新研究、高端人才培养与社会服务的省级级基地。
实验项目:
1、机器人仿真与离线编程训练
2、虚实结合机器人综合实验
3、六轴机器人单元在线编程训练
4、六轴机器人操作综合训练
实验特色:
实验室紧密围绕服务机器人智能化、产业化的重大需求,以“工业机器人技术”为中心,长期、系统地进行相关科学性研究和实验。结合智能制造,依托机器人工程中心平台,开展战略性、创新性的先进机器人应用研究,攻克一批机器人领域核心技术瓶颈问题,大力促进科研成果的转化。
实验设备:
序号 |
实训设备名称 |
参考型号(备注) |
参考供应商 |
数量 |
1 |
机器人离线编程系统 |
OCTOPUZ可用于智能工厂虚拟仿真与离线编程系统:双用 |
广数/华航/OCTOPUZ(巨轮)离线编程软件任选其一 |
52 |
建筑机器人结构设计仿真软件集(建筑学院) |
AEC Collection单机版3年Subscription |
Autodesk授权金牌经销商/广州奥尼斯特电子有限公司 |
1 |
|
电脑及电脑桌 |
i7CPU,双核,8G,1T |
园大 |
52 |
|
2 |
虚实结合机器人综合实训平台 |
JLVRC-Robotics |
巨轮 |
2 |
虚实结合机器人综合应用软件 |
OCTOPUZ智能工厂虚拟仿真系统(教育版)可与离线编程共 |
巨轮 |
|
|
3 |
机器人单元 |
TD-A104 |
园大 |
4 |
四、每学期安排到工程中心实践课程及学时:
平台 |
总学时 |
安排学时 |
教学班名称 |
上课人数 |
授课教师 |
备注 |
数字通信原理 |
64 |
8 |
17电信1班 |
38 |
周卫星 |
离线仿真实验室 |
工业机器人基础 |
48 |
4 |
18机器人班 |
47 |
曹照均 |
机器人应用实验室 ,机器人仿真与离线编程实验室 |
工业机器人技术基础 |
32 |
4 |
17机械电子班 |
16 |
张德福 |
机器人应用实验室 ,机器人仿真与离线编程实验室 |
机器人构造原理与调试安装校对标定 |
112 |
112 |
17机制1-4班,17、18机械电子,18机器人 |
230 |
曹照钧 |
机器人应用实验室 ,机器人仿真与离线编程实验室 |
机器人离线编程与数字孪生 |
160 |
160 |
17机制1-4班,17、18机械电子 |
185 |
周书兴 |
机器人应用实验室 ,机器人仿真与离线编程实验室 |
机器人工作站综合应用 |
32 |
32 |
17机械电子班 |
30 |
曹照钧 |
机器人仿真与离线编程实验室 |
机器人控制与数字孪生编程 |
128 |
128 |
8机制1-2班,18机械电子,18机器人 |
125 |
周书兴 |
机器人仿真与离线编程实验室 |